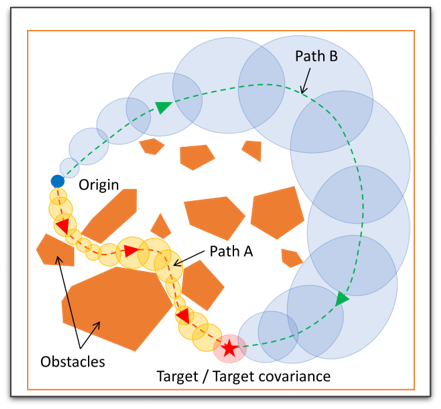
This research project is motivated by human decision makers' simplicity-oriented path planning capability (e.g., simple and long paths are sometimes preferred to short and complex paths), which sometimes explains the reliability and the robustness of human decisions. Inspired by the notion of rational inattention (C. Sims 2003), we propose a novel information-geometric distance metric that enables us to evaluate the "length" of a path based not only on its Euclidean length, but also on the sensing cost that would be required for a robot to follow it. We develop computationally efficient path planning algorithms that can identify the shortest possible path (in terms of this innovative distance metric) through obstacle-filled spaces.
The report can be accessed at https://ieeexplore.ieee.org/document/10001826/.