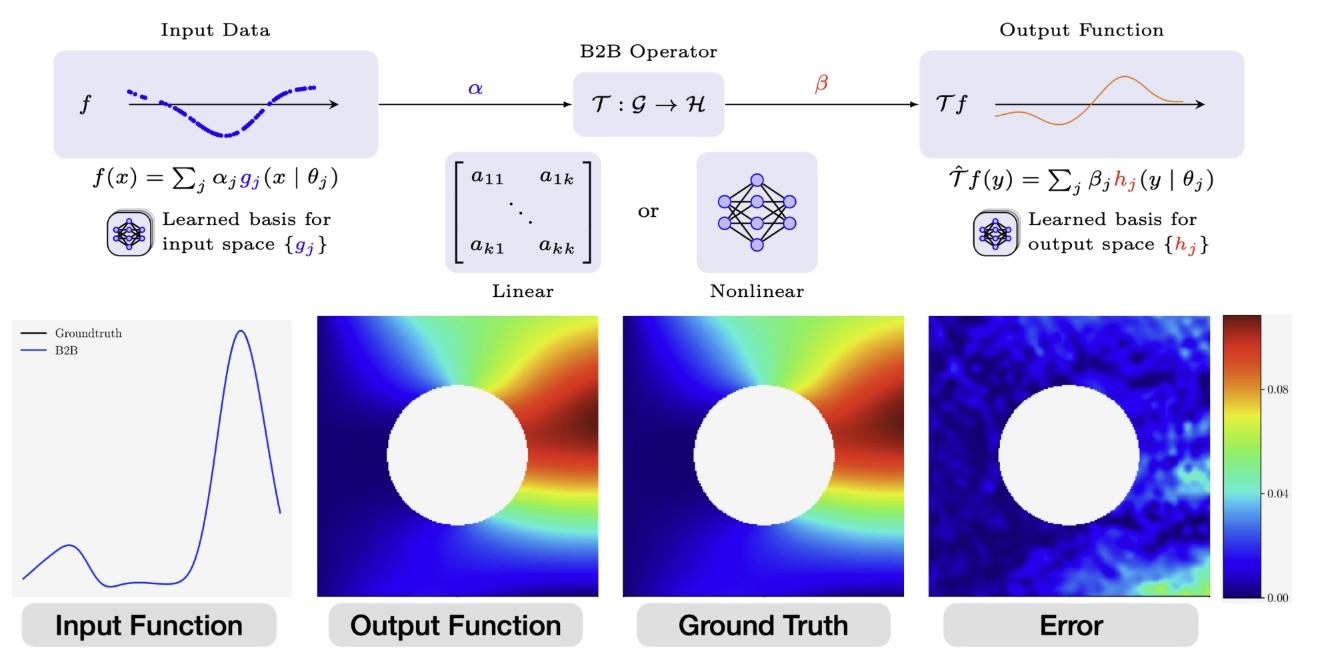
Operator learning is a new frontier in computational learning-based approaches for autonomy that enables us to work directly with function-to-function mappings. We present Basis-to-Basis (B2B) operator learning, a novel approach for learning operators on Hilbert spaces of functions based on the foundational ideas of function encoders. We decompose the task of learning operators into two parts: learning sets of basis functions for both the input and output spaces, and learning a potentially nonlinear mapping between the coefficients of the basis functions. We demonstrate the basis-to-basis approach on several benchmark PDE modeling tasks, achieving an order of magnitude improvement over state of the art. The basis-to-basis approach avoids the need for a fixed grid or mesh, which enables operator learning for autonomy and robotics more broadly. Basis-to-basis operators open the door for the application of operator learning techniques to diverse problems in autonomy and robotics, particularly in perception, modeling, and control.
Contributors: Tyler Ingebrand, Adam J. Thorpe, Somdatta Goswami, Krishna Kumar, and Ufuk Topcu.