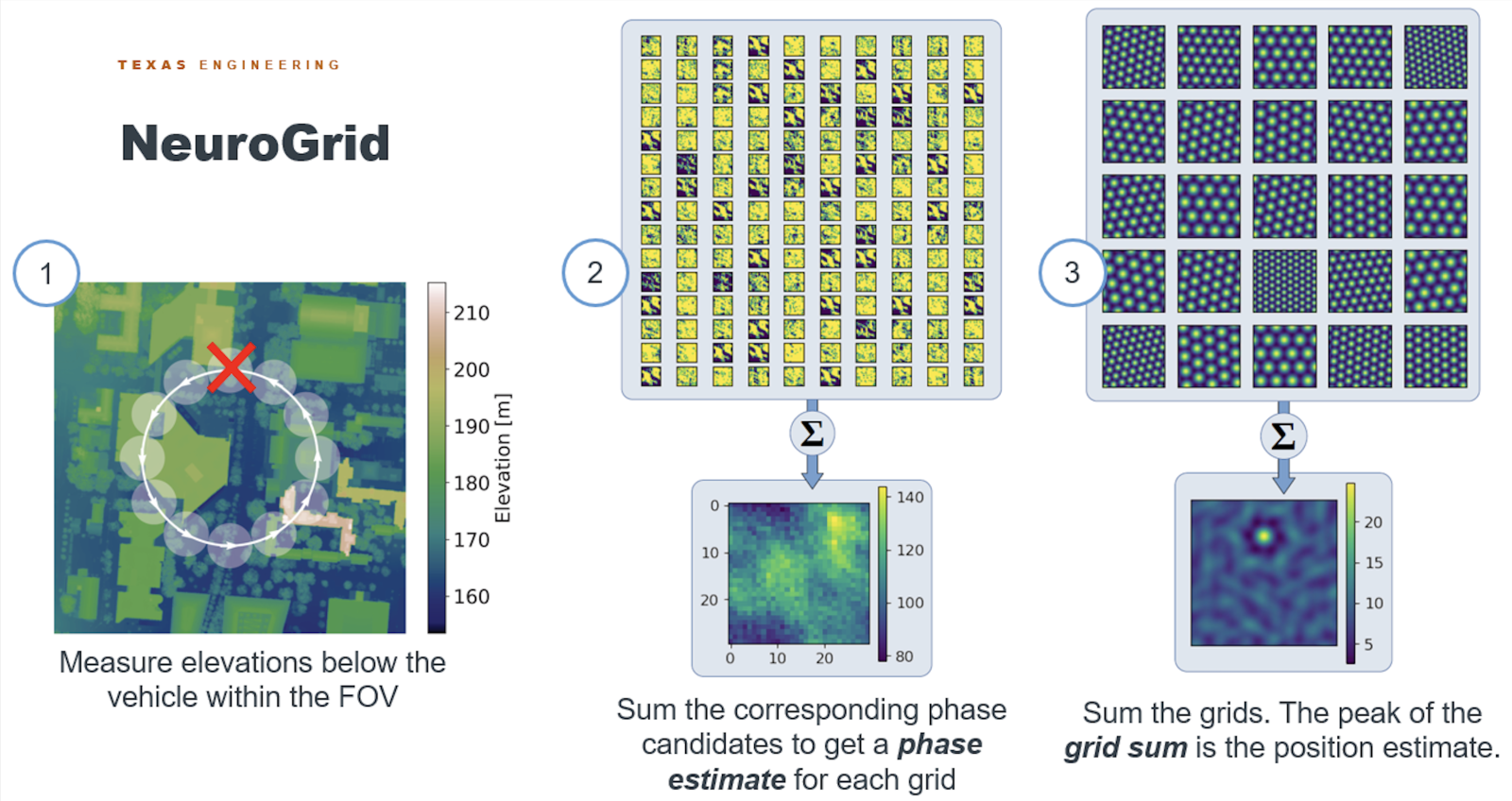
In traditional approaches to terrain-relative navigation (TRN), terrain measurements are compared to an elevation map carried onboard. These methods are computationally expensive, and it is impractical to store high-quality maps of large swaths of terrain. In this work, we generate position measurements using a novel method inspired by navigation in animals. We incorporate the approach into an inertial navigation scheme using a novel measurement rejection strategy and online covariance computation. Our results show that the filter provides accurate state information over the course of a long trajectory.
Contributors: Kristen Michaelson, Felix Wang, and Renato Zanetti